DSP / ARM Hello World¶
- Table of contents
- DSP / ARM Hello World
This guide will step you through setting up your MityDSP-L138 system and build environment so that you can run a hello world program on both the DSP and ARM which sends a message, "Hello DSP", from the DSP to the ARM processor. This uses the dsplink driver for inter-processor communications:
ARM received a message from the DSP:
DSP Message = "Hello Word. DSP Received Message = 'Hello DSP'"
Prerequisites¶
- Make sure your system and build environment are setup to run a Hello World program on the ARM side.
- See Starter Guide for a step by step guide of this process.
- Make sure your MityDSP-L138 module has the latest Kernel and Filesystem to match the MDK you are using
- See Updating devkit to latest MDK fpr a step by step guide of this process.
- Make sure that you have the necessary library and include files from Critical Link (The CL Linux Virtual Machine has all the necessary files pre-loaded):
- The 2014-01-13 MDK, which can be downloaded from the Files section on this site.
- If you are registered and logged in, there should be a "Files" tab at the top of this page.
- Note: If you are having trouble installing the MDK see this post.
- To install the MDK on a Windows machine (for using CCS on the windows machine), you should use cygwin to install the .run file to an appropriate directory.
- You will need to set up your environment variables to point to this MDK directory.
- On your Linux Virtual Machine provided by Critical Link you will need:
- arm_main.cpp - Hello World code for the ARM ($MDK/examples/DspHelloWorld/ARM/)
- dsplinkk.ko - Can be found in the latest MDK release ($MDK/images/modules/) or you can rebuild DSPLink. See details at DSP Link Configuration.
- dsplink.lib - Can be found in the latest MDK release ($MDK/lib/ARM/Release/) or you can rebuild DSPLink. See details at DSP Link Configuration.
- libdsp.a and libdsp.so.* - Can be found in the latest MDK release ($MDK/lib/ARM/Release/) or you can rebuild the libdsp library.
- main_dsp.cpp - Hello World code for the DSP ($MDK/examples/DspHelloWorld/DSP/HelloWorldDSP/)
- dspcore.lib, dsplink.lib, etc. - Can be found in the latest MDK release ($MDK/lib/DSP/Release)
- Platform.tci - Can be found in the latest MDK release ($MDK/sw/DSP/templates/criticallink/platforms/MityDSP-L138/)
- SYS/BIOS must be installed before Code Composer Studio (If you are using the 2018 Virtual Machine image this is already installed)
- SYS/BIOS version 5.42 is the version on the unified VM. Other versions of SYS/BIOS have not been tested.
- SYS/BIOS installers can be found on the TI downloads site
- The 2014-01-13 MDK, which can be downloaded from the Files section on this site.
Compiling for the ARM¶
This process documents how to compile/build the application for the ARM processor (arm_main.cpp)
- Download and utilize the Makefile if you prefer to work from the command line.
- Or, if you prefer to use an IDE, Open Eclipse or Code Composer and create a new C++ project
- Follow the procedure outlined in Starter Guide for creating a new project
- Alternatively you can use Qt Creator. https://support.criticallink.com/redmine/projects/arm9-platforms/wiki/QT_Starter_Guide#Tip
- Add the arm_main.cpp file to the project
- This can be accomplished by simply moving the file to the project's directory and refreshing the project.
- This can also be accomplished by importing the file. See Help - Eclipse SDK for details.
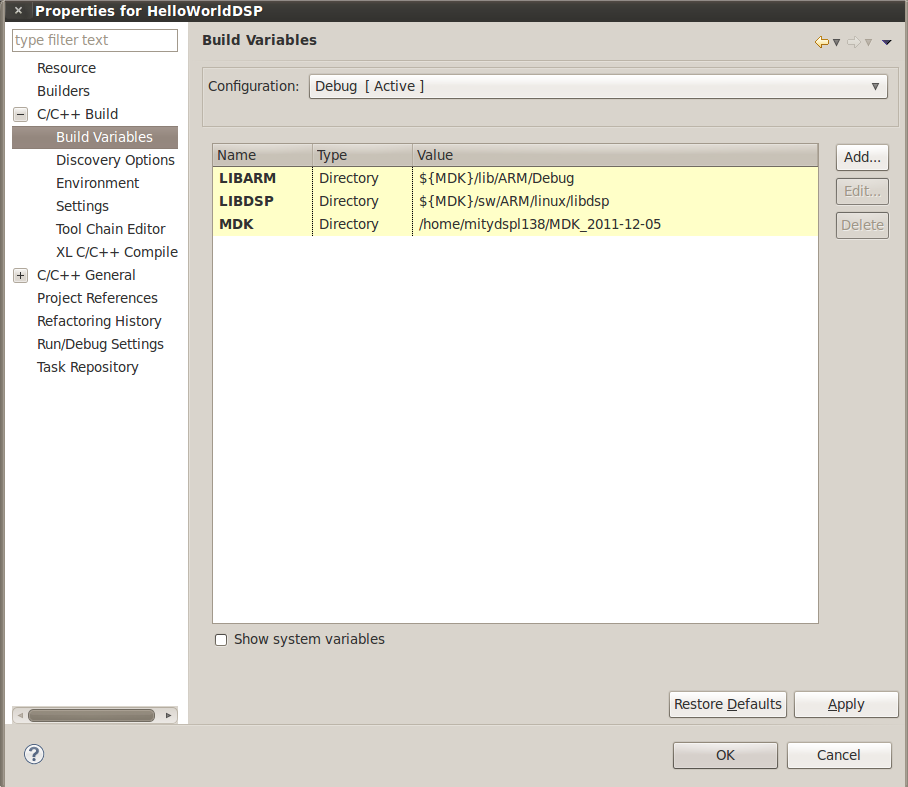
- Set up Build Variables
- In project properties, under 'C/C++ Build' click on 'Build Variables'
- Click 'Add...' and type variable name, Check "Apply to all configurations", set 'Type' to 'Directory', enter path and click 'Ok'
- Add the paths shown in the following image
| Variable Name | Type | Value |
| MDK | Directory | ${HOME}/MDK_2014-01-13 |
| LIBARM | Directory | ${MDK}/lib/ARM/Debug |
| LIBDSP | Directory | ${MDK}/sw/ARM/linux/libdsp |
- Note: As you follow through this guide, please follow closely the use of quotations when using build variables. Differing use could lead to build errors which are difficult to diagnose.
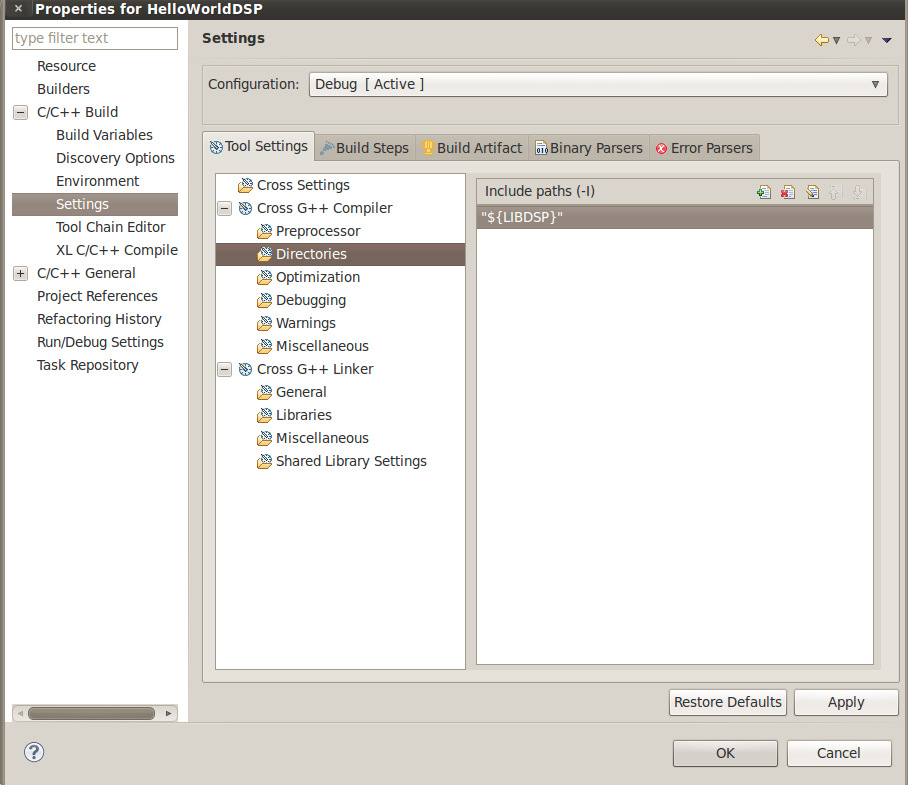
- Add the path to $MDK/sw/ARM/linux/libdsp to the include path
- In project properties, under 'C/C++ Build' click on 'Settings'
- Under the 'Tool Settings' tab, expand 'Cross G++ Compiler' and click on 'Directories'. Called 'Includes' in some versions.
- Click the Add button and enter the path to "${MDK}/sw/ARM/linux/libdsp" or "${LIBDSP}" if defined build variables
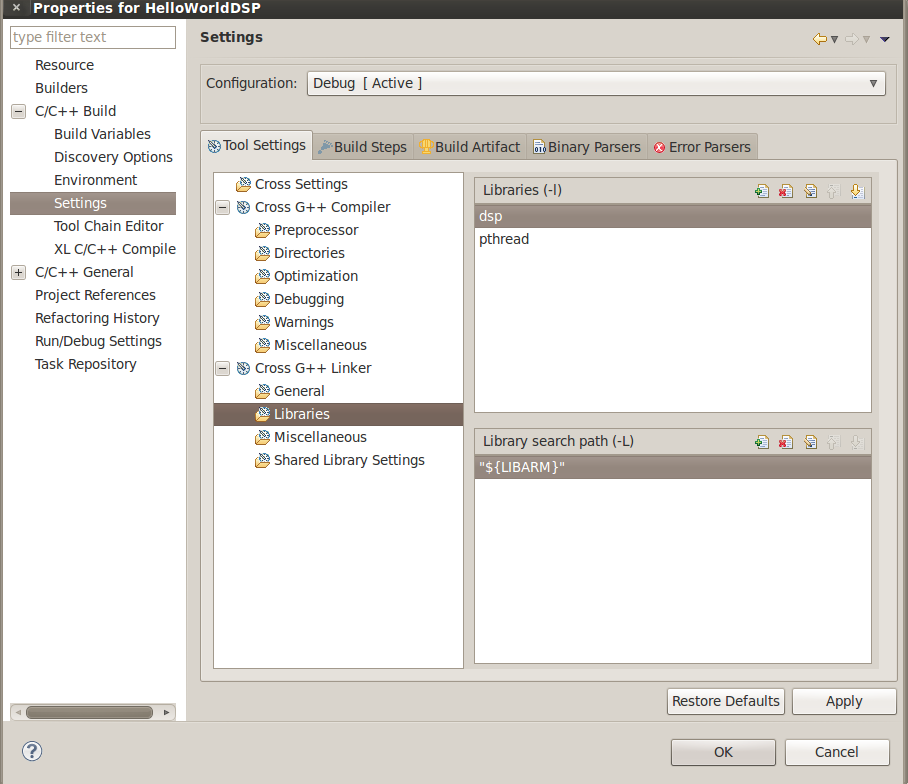
- Link against the libdsp and libpthread libraries
- In project properties, under 'C/C++ Build' click on 'Settings'
- Under the 'Tool Settings' tab, expand 'Cross G++ Linker' and click on 'Libraries'
- In the 'Libraries (-l)' window pane use the add button to add 'dsp' and 'pthread'
- In the 'Library search path (-L)' window pane add the path to "${MDK}/lib/ARM/Release" or "${LIBARM}" if defined build variables
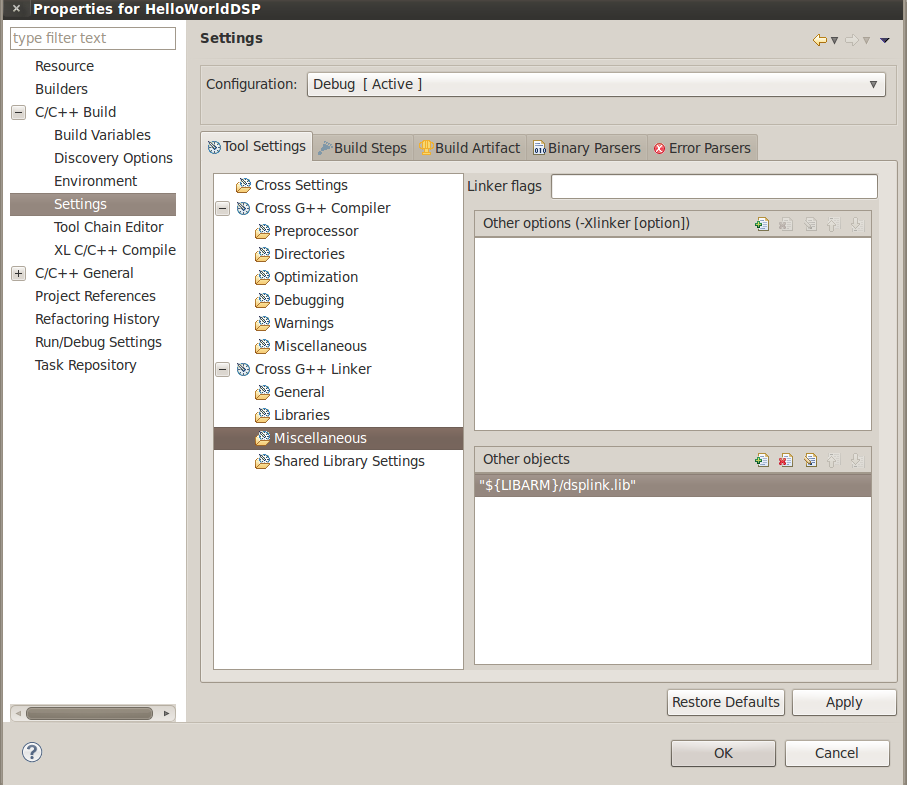
- Link against dsplink.lib
- In project properties, under 'C/C++ Build' click on 'Settings'
- Under the 'Tool Settings' tab, expand 'Cross G++ Linker' and click on 'Miscellaneous'
- In the 'Other objects' window pane click add and add the path to "${MDK}/lib/ARM/Release/dsplink.lib" or "${LIBARM}/dsplink.lib" if defined build variables
- Build the project.
- Copy libdsp.so.* to the MityDSP-L138
- Copy the library ($MDK/lib/ARM/Release/) to the /lib directory
- See Starter Guide for details on copying files to the MityDSP-L138
- Copy the built ARM executable from the CCS/Eclipse project (i.e. "HelloWorldDSP") to the MityDSP-L138
- If CCS on the VM was used with the default workspace the file can be found in the /home/mitydsp/workspace_v7/HelloWorldDSP/Debug/ directory
- See Starter Guide for details on copying files to the MityDSP-L138
Compiling for the DSP - CCSv7.3 on Linux (Unified VM)¶
Setup¶
As of February 2018 the Critical Link Unified VM (https://support.criticallink.com/redmine/projects/arm9-platforms/wiki/Linux_Build_VM) will come with Code Composer Studio v7.3.0 and dependencies already installed.
The MDK root directory (i.e. <MDK> ) is '/home/mitydsp/MDK_2014-01-13'.
Create a new CCS project¶
- File->New->CCS Project
If CCS Project isn't listed, check under Other -> Code Composer Studio.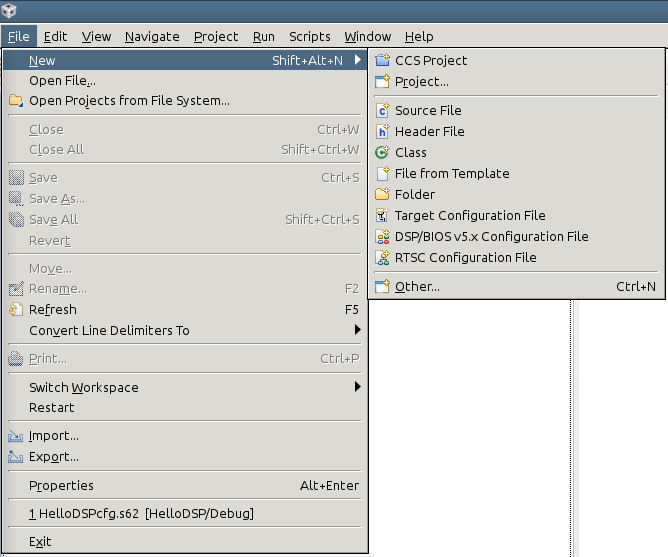
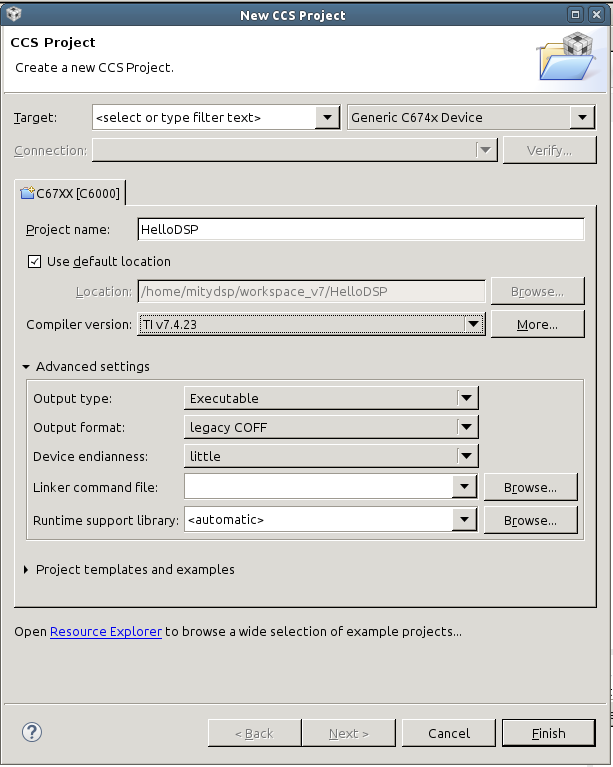
- Give the project a name
- Set Target (right-most drop-down) to 'Generic C674x Device'
- Set 'Compiler version:' to 'TI v7.4.23'
- If that option does not exist, you'll need to add it...
- Select 'More' then 'Add...'
- Navigate to '
/opt/ti/ti_cgt_c6000_7.4.23' - In the 'Discovered tools:' > 'C6000' list, select 'TI v7.4.23'
- Select 'OK'
- Expand the 'Advanced settings menu':
- Set 'Output type:' to 'Executable'
- Set 'Output format:' to legacy COFF
- Set 'Device endianness' to 'little'
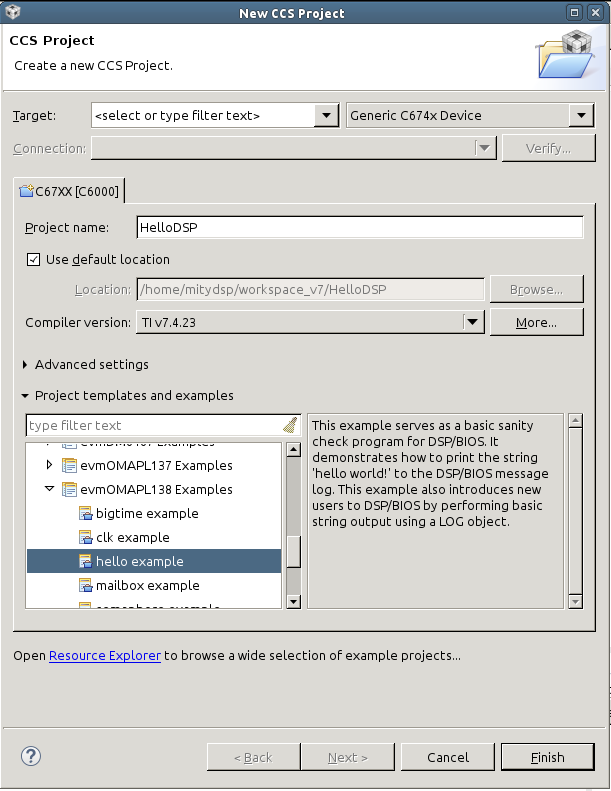
- Expand 'Project templates and examples':
- Inside 'DSP/BIOS v5.xx Examples' open up 'evmOMAPL138 Examples' and select 'hello example'
- Inside 'DSP/BIOS v5.xx Examples' open up 'evmOMAPL138 Examples' and select 'hello example'
- Click 'Finish'
- Delete the hello.c file that was auto-generated when the project was created by right clicking the file within your project in the 'Project Explorer' and selecting 'Delete'
- Add the main_dsp.cpp file to the project. <MDK>/examples/DspHelloWorld/DSP/HelloWorldDSP/main_dsp.cpp
- This can be accomplished by copying main_dsp.cpp to the project directory
- This can also be accomplished by right clicking on the project and selecting 'Add Files...', navigating to the cpp file, then selecting 'OK'
- Create a DSP/BIOS Configuration file
- Delete any created tcf file for the hello example, e.g. "hello.tcf"
- Left-click the project to highlight it
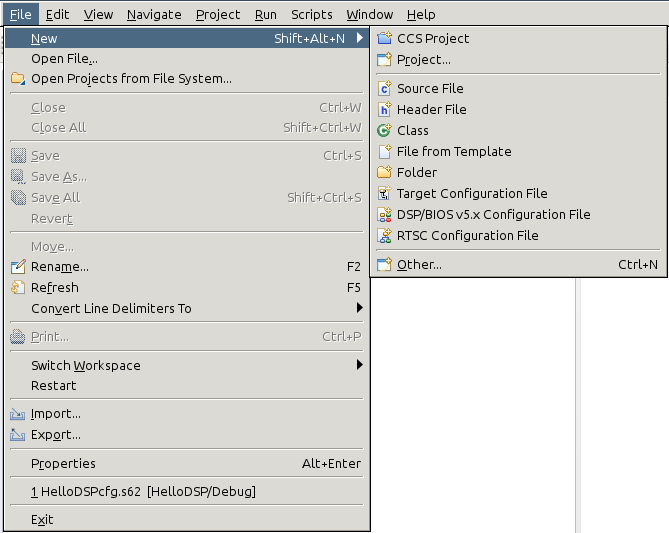
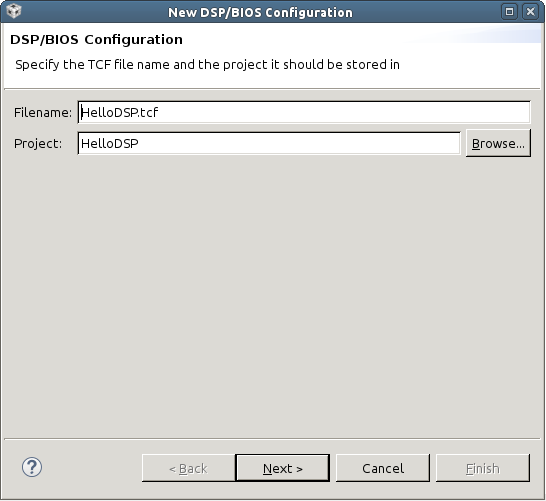
- File->New->DSP/BIOS v5.x Configuration File
- Note: If 'DSP/BIOS v5.x Configuration File' is not an option, you will need to select 'Other...' and search for 'bios'
- Note: If 'DSP/BIOS v5.x Configuration File' is not an option, you will need to select 'Other...' and search for 'bios'
- Click 'Next' on the window that pops up (default name is fine)
- Click Modify
- Browse to the directory which contains Platform.tci - <MDK>/sw/DSP/templates - then select 'OK'
- Select criticallink.platforms.MityDSP-L138 (Description = 'MityDSP-L138 (300 MHz)')
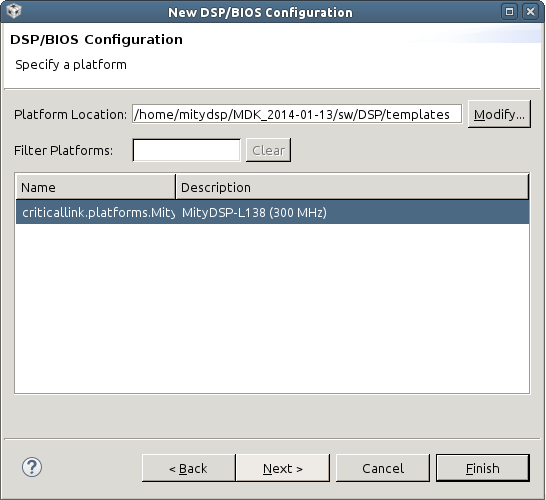
- Click 'Finish'
- Close and ignore the error window that pops up
Add environment variables which point to the necessary libraries for the DSPL138/EDMA3 (Suggested)¶
- Note: Please be careful where and when you use quotes around path names, especially if you are using Macros
- Quotes will be required if a path name has a space in it (otherwise it will be read as two separate paths by the compiler).
- However, you should only encase the actual include specification in quotes and not the macro itself.
- Here's an example of what can go wrong:
- You create a Environment Variable ${MDK} = "c:/my work/MDK"
- You specify a search path as "${MDK}/sw/DSP/templates"
- However, this derefences to ""c:/my work/MDK"/sw/DSP/templates" where the quotes are no longer surrounding the space in your path name
- Right click on project and select 'Properties'
- Click on 'Build'
- Click on the 'Environment' tab
- Add variables - relevant paths are shown in the picture below
- If using the MDK the header files should be stored in ${MDK}/sw/DSP/lib and the libraries should be stored in ${MDK}/lib/DSP
- Depending on where the EDMA package (downloaded as a prerequisite) installed, your TI_EDMA3 path may differ
MDK <dir to MDK> MITYDSPL138_LIBDBG ${MDK}/lib/DSP/Debug MITYDSPL138_SW_LIB ${MDK}/sw/DSP/lib TI_EDMA3 ${MDK}/sw/3rdparty/edma3lld_01_11_00_03/packages/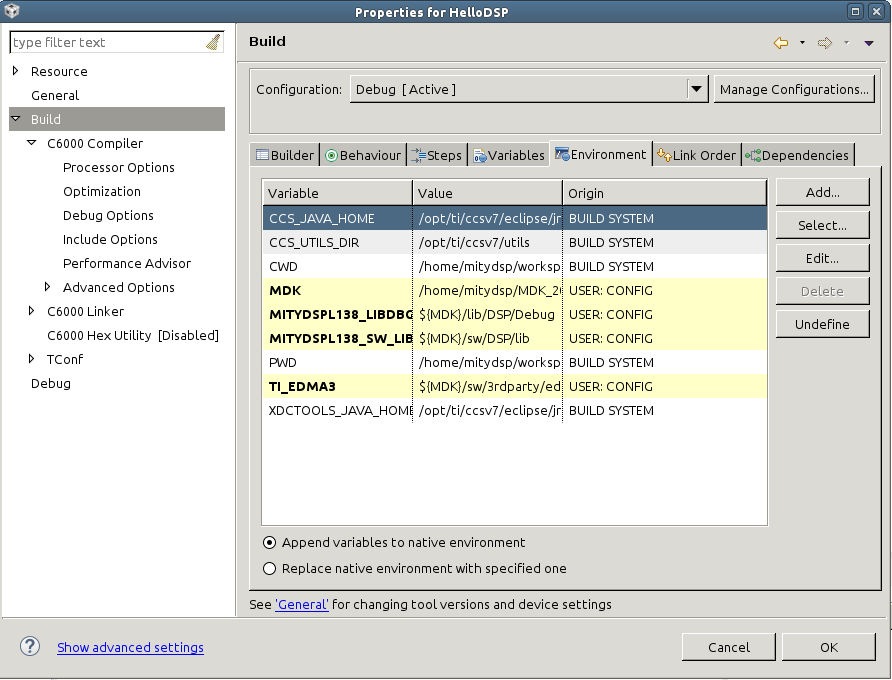
- Specify the project Include Options
- Right click on the project and select 'Properties'
- Expand 'Build'
- Expand 'C6000 Compiler' and select 'Include Options'
- Add the appropriate directories, or the Environment Variable(s) you created in the above step (i.e. "${MityDSPL138_LIBDBG}"), to the Include Options. Note quotes are important.
"${MITYDSPL138_LIBDBG}" "${MITYDSPL138_SW_LIB}" "${TI_EDMA3}" "${TI_EDMA3}/ti/sdo/edma3"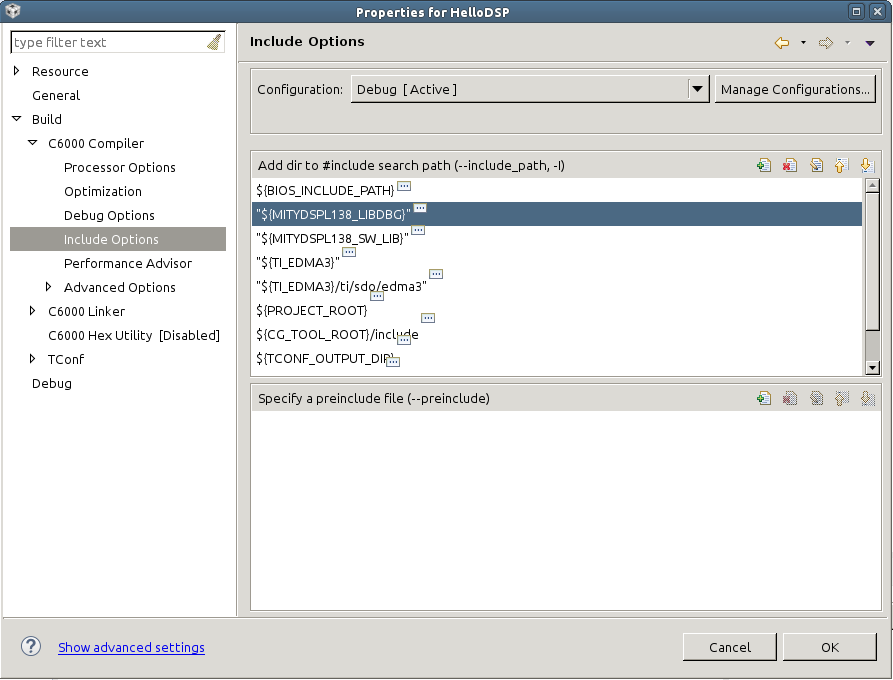
- Specify the linking options
- Right click on the project and select 'Properties'
- Expand 'Build'
- Expand 'C6000 Linker' and select 'File Search Path'
- In the "Include library file or command file as input (--library, -l)" pane, add the following:
"dspcore.lib" "edma3_drv_bios.lib" "edma3_drv_bios_sample.lib" "edma3_rm_bios.lib" "dsplink.lib" "dsplinkdata.lib" "dsplinkmpcs.lib" "dsplinkmplist.lib" "dsplinkmsg.lib" "dsplinknotify.lib" "dsplinkpool.lib" "dsplinkringio.lib"
- In the "Add <dir> to library search path (--search_path, -i)" pane, add the directories, or Environment Variable(s) created above, that contain the above libraries
- These libraries are located in ${MDK}/lib/DSP/Debug or ${MDK}/lib/DSP/Release if you are pulling them from the MDK (shown using the "${MityDSPL138_LIBDBG}" Environment Variable)
"${TI_EDMA3}/ti/sdo/edma3/drv/sample/lib/omapl138/Debug" "${TI_EDMA3}/ti/sdo/edma3/rm/lib/omapl138/Debug" "${TI_EDMA3}/ti/sdo/edma3/drv/lib/Debug" "${MITYDSPL138_LIBDBG}" "${MITYDSPL138_SW_LIB}" "${MITYDSPL138_SW_LIB}/TILibs"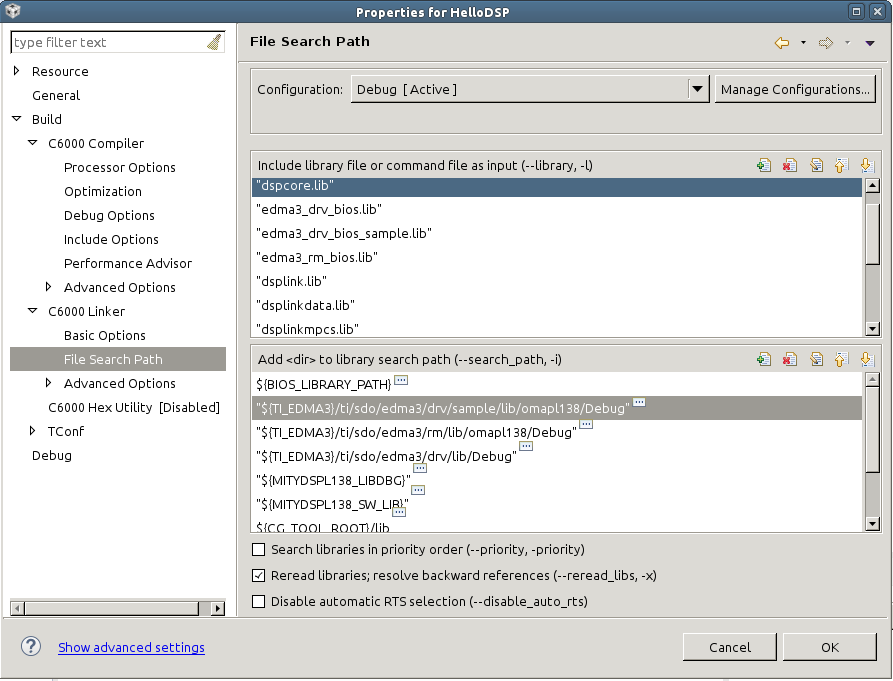
- These libraries are located in ${MDK}/lib/DSP/Debug or ${MDK}/lib/DSP/Release if you are pulling them from the MDK (shown using the "${MityDSPL138_LIBDBG}" Environment Variable)
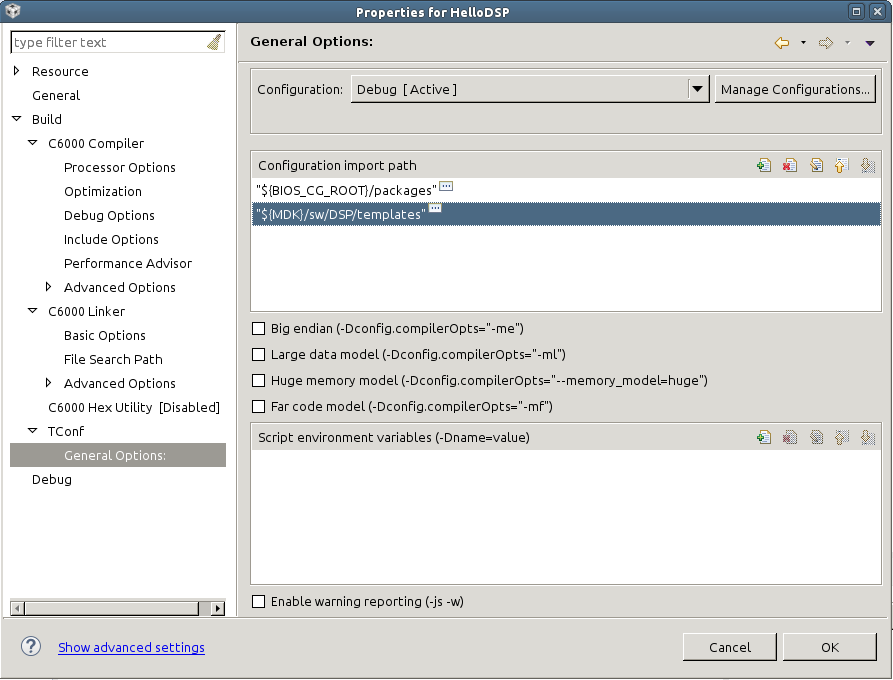
- Specify the location of ${MDK}/sw/DSP/templates directory, where the criticallink/platforms/MityDSP-L138/Platform.tci file is located:
- Right click on the project and select 'Properties'
- Expand 'Build'
- Expand 'TConf' and select 'General Options'
- Set to the path to the location of the directory containing criticallink/platforms/MityDSP-L138/Platform.tci
"${MDK}/sw/DSP/templates" - Note: you must specify the location of the ${MDK}/sw/DSP/templates directory and not any deeper as the criticallink/platforms/MityDSP-L138/ path is expected in parts of the build process.
Final steps¶
- Build the project
- Select 'Project' > 'Build All' or 'Build Project'
- Copy the built executable from the CCS project (i.e. "HelloDSP.out") to the MityDSP-L138
- The file is located in the /home/mitydsp/workspace_v7/HelloDSP/Debug/ directory unless a non-default workspace was specified in CCS
- See Starter Guide for details on copying files to the MityDSP-L138
Running the ARM/DSP programs¶
- Insert (insmod) the DSPLink drivers
root@mityomap# insmod /lib/modules/$(uname -r)/extra/dsplinkk.ko
- The pre-built MityDSP-L138 MDK filesystems include the dsplinkk.ko driver. If missing you can copy and/or rebuild the driver from the MDK
- The pre-built copy is located in the $MDK/images/modules/ directory
- See Starter Guide for details on copying files to the MityDSP-L138
- The pre-built MityDSP-L138 MDK filesystems include the dsplinkk.ko driver. If missing you can copy and/or rebuild the driver from the MDK
- Execute the ARM (HellowWorldDSP) and DSP (HellowWorldDSP.out) programs
root@mityomap# ./HelloWorldDSP HelloWorldDSP.out
- Example output
root@mityomapl138:~# ./HelloWorldDSP HelloWorldDSP.out Loading file HelloWorldDSP.out PROC Load successful Starting application. ARM received a message from the DSP: DSP Message = "DSP Initialization finished." Sending a message to the DSP. Waiting for DSP response (type 'q' to quit)... ARM received a message from the DSP: DSP Message = "Hello Word. DSP Received Message = 'Hello DSP'" Exiting application.
Note: There is currently a bug in the destructors of ipc_inbound and ipc_outbound that cause assert statements to get hit. The delete statements have been skipped as a way of removing the error messages. This is a decent solution for now as most applications shouldn't need to be shutdown and restart large numbers of times.
Binary message template¶
If you would like to use a binary message type instead of string, see below for example.